Kondo KHR-2HV Robot Simulation Using Webots
Why does that robot look so happy?
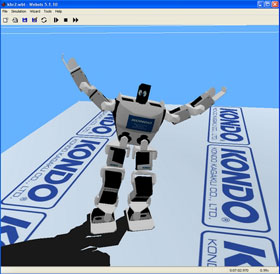
Simple, it's just been successfully simulated to a surprisingly degree by Laurent Lessee using the Webots robot simulation software application. The robot is a Kondo KHR-2HV humanoid. For this simulation project, Laurent not only simulated the physical aspects of the robot, he also created additional programs to simulate the RCB3 on-board robot controller within the Webots system.
Laurent is one of the few people in the world currently building sophisticated humanoid robot simulation models. Prior to simulating the KHR-2HV in Webots, Laurent successfully simulated the same robot using the Microsoft Robotics Studio tools, so we really wanted to track him down to find out some of his secrets, and to hear his comparisons between the two robot simulation packages.
Laurent: Sure. Here's a quick outline:
(Via: Robots-Dreams.com and Read More)
Simple, it's just been successfully simulated to a surprisingly degree by Laurent Lessee using the Webots robot simulation software application. The robot is a Kondo KHR-2HV humanoid. For this simulation project, Laurent not only simulated the physical aspects of the robot, he also created additional programs to simulate the RCB3 on-board robot controller within the Webots system.
Laurent is one of the few people in the world currently building sophisticated humanoid robot simulation models. Prior to simulating the KHR-2HV in Webots, Laurent successfully simulated the same robot using the Microsoft Robotics Studio tools, so we really wanted to track him down to find out some of his secrets, and to hear his comparisons between the two robot simulation packages.
(Images File: kondo-khr-2hv-13.jpg)
Lem: Could you give us a brief overview of the process you followed to create the KHR-2HV simulation in Webots?Laurent: Sure. Here's a quick outline:
- Simplification of the Kondo KHR-2HV model
- Separation of the model into individual parts
- Creation of tools to generate the parts and related information for Webots
- Generation of bounding box and Convex hulls for visualization of the robot
- Creation of a RCB3 controller simulation program for use in Webots
- RCB file support
- Scenario support
- Keyboard functionality to simulate the remote control
- Creation of a sensor simulation program for Webots
- Program was designed to simulate both gyros and an accelerometer, but Only the accelerometer has been tested so far
- Texture mapping tool
(Via: Robots-Dreams.com and Read More)
Technorati : Homanoid, KHR-2HV, Kondo, Robot Kits
Labels: Huminoid, KondoKHR-2HV, Robots
posted by Kondo HKR-2HV @ 22:09
![]()



0 Comments:
Post a Comment
Subscribe to Post Comments [Atom]
<< Home